1. 3 sided Fully Immersive Virtual Reality (VR) Facility
A three-sided, fully immersive Cave Automatic Virtual Environment (CAVE) VR facility has been successfully established at IPR, designed to give remote operators the same unrestricted perception of a dynamic task scene as if they were physically present. The facility features three projection display screens, a six-degrees-of-freedom optical head and hand tracking system, a haptic force feedback arm, and 3D middleware applications. Seamlessly compatible with design software such as CATIA V5 and SolidWorks, it supports virtual walkthroughs, accurate prototyping, system integration studies, real-time monitoring of remote handling operations, and operator training. Users can perform virtual assembly, collision detection, and fly-throughs while experiencing realistic force feedback through the integrated haptic arm.
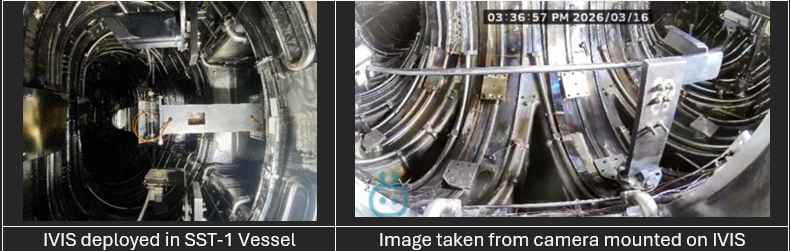
2.UHV & High temperature compatible In-Vessel Inspection System
Plasma-facing components (PFCs) in a tokamak are subjected to high heat and particle fluxes that cause damage over time, making periodic in-vessel inspection essential for health monitoring between plasma experiments without breaking the vacuum conditions. To address this, an In-Vessel Inspection System (IVIS) has been developed at IPR, capable of operating in vacuums up to 1×10⁻⁷ mbar and temperatures up to 100°C. The system comprises a six-degrees-of-freedom articulated arm with a reach of up to four meters, mounted on a linear guide with a storage vacuum chamber, and is remotely controlled via a virtual reality-based interface. A position repeatability of ±2mm has been demonstrated during initial testing. Beyond tokamak applications, the IVIS can be readily adapted for inspection and maintenance in any large system involving challenging environments such as vacuum, elevated temperatures, or confined spaces.
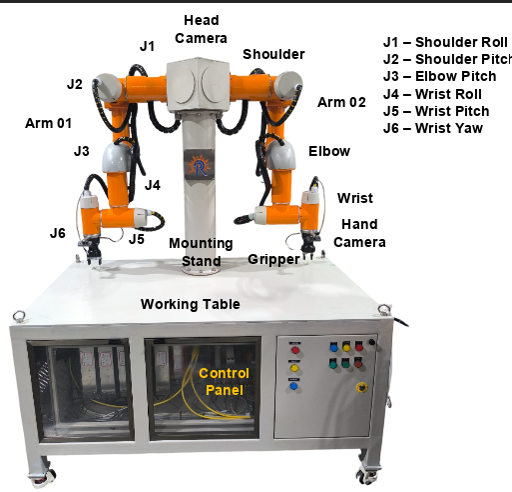
3.Dexterous Dual Arm Manipulator for Challenging Environments
A dual-arm, 12-DOF system has been designed in-house and demonstrated successfully. It is capable of performing tasks such as picking, placing, maneuvering, and light manipulation, including minor assembly or disassembly of components. Each arm provides six degrees of freedom, supports a payload of ~5 kg, and offers a reach of about 1 meter. The testing and mock-up trials of the system were carried out using in –house developed servo-control system. A digital twin of the DAM system has also been developed. The DAM was successfully operated in semi-automatic and manual modes through the digital twin interface. The operators could pre-visualize tasks in the digital twin, reducing setup time and preventing mechanical collisions.
4. 6-DOF Haptic Force Feedback based Master arm
To execute dynamic remote handling tasks safely, a 'man-in-loop' architecture is typically employed. Accordingly, a six-axis haptic master arm with force feedback has been developed at IPR for operator-level control of robotic manipulators. The system uses back-drivable actuators and an associated control system to generate proportional forces and torques on the operator's hands, mirroring those experienced by the slave robot joints. The system is highly valuable for planning operation sequences, operator training, and mock-up demonstrations, with initial test results confirming high precision, accuracy, and low latency. A passive gravity compensation system using compression springs is being integrated to enhance the master arm response, stability and reduce operator fatigue ensuring smoother operation.
5.Tendon driven Hyper redundant Inspection System (HyRIS)
Hyper-redundant manipulators are a flexible alternative to conventional robots for inspection and maintenance in confined and challenging environments. Unlike traditional robots where each joint moves in a single plane, hyper-redundant robots use cable-driven joints with a spherical range of motion, giving them elephant trunk like dexterity capable of navigating narrow spaces in three dimensions. This makes them particularly well-suited for tokamak environments, where lightweight design, high dexterity, and fast deployment are essential. IPR has designed, developed, and successfully tested an 18 axis HyRIS system for inspection applications in such demanding conditions.
6.Vacuum Automation system (VAS)
The tendon driven vacuum automation system has been developed for a sample tile manipulation inside a vacuum vessel (1e-7 mbar pressure) for diagnostic applications. The system is successfully tested for motion under vacuum. The digital twin of the VAS system is also developed. A CANopen network has been adopted as the motion control interface. The system was demonstrated with rotation repeatability within ±0.5°. Latency measurements using UDP timestamps showed consistent communication times of 15–20 ms. More mock-up trails are being carried out to test the control algorithms.
7.Articulated Robotic Inspection Arm (ARIA)
• An Articulated Robotic Inspection Arm (ARIA) has been developed at IPR as a six-axis robotic system with a payload capacity upto 25 kg and a reach of approximately 2.2 meters. The system is programmed and remotely controlled, and has been successfully demonstrated for tile handling scenarios inside a mock up toroidal vessel using a 5 kg payload gripper.
8.AI, Machine Learning and Machine Vision Applications
A range of artificial intelligence, machine learning, and machine vision applications have been developed to advance robotic capabilities. These include image processing tools for robotics, visual servoing applications for precision control, and a Deep Q-learning based approach for solving the inverse kinematics of the HyRIS hyper-redundant system. Additionally, a deep learning based prototype system has been developed for segregating organic and inorganic waste. Work in these areas is ongoing, with further applications being explored across various robotic and automation tasks.
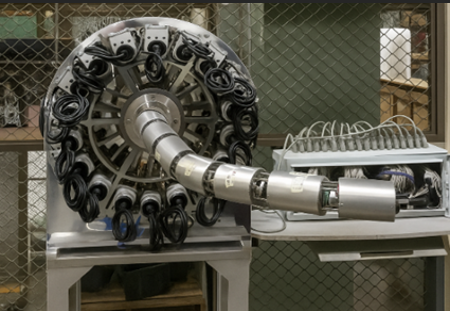
9.Magnetic Mapping system for Aditya-U
The magnetic mapping system features three degrees of freedom — two linear and one rotational — with a radial reach of 950 mm along the Y-axis and an axial reach of 700 mm along the Z-axis, making it well-suited for operations in toroidal systems. It is designed to manipulate a magnetic probe as the end-effector, with the rotational DOF used for precise system alignment. Horizontal and vertical motions are driven by ball screw and lead screw mechanisms actuated by brushless DC servo motors with planetary gearheads, providing a positioning accuracy of approximately 100 µm. The system is operated using IEC 61131-compliant programming and incorporates provisions to minimize magnetic field influence on the end-effector during experimental shots.
10.RHRTD prototype work cell Development
IPR has designed and built a range of proof-of-concept robotic systems to explore diverse kinematic configurations and their potential applications. These include a Delta robot for high-speed pick-and-place operations, a Stewart platform for precise multi-axis motion control, a SCARA robot for planar assembly tasks, an omnidirectional mobile robot with SLAM for flexible navigation in constrained spaces, and Cartesian robots for structured linear motion applications. Together, these prototype systems serve as valuable testbeds for evaluating robotic concepts, refining control strategies, and building in-house expertise across a broad spectrum of robotic architectures.